くろまぐろワールド
HOME
工房
紙工
写真
MAIL
ペンギンロボット
以前製作した2足歩行ロボットを改良しました。
肩関節も可動させ、RCサーボモータ10個制御しています。
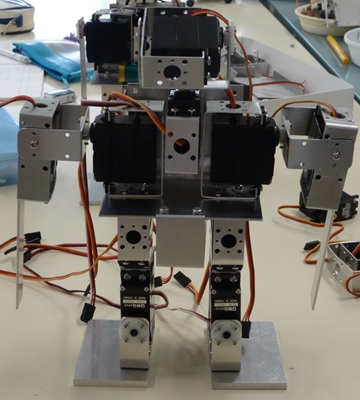
組み立て写真です。制御にはPIC16F819を使用しました。
写真のようにペンギンのぬいぐるみをかぶせました。
肩にも布をかぶせて完成です。赤外線リモコンで操作します。
動いている映像をご覧下さい。